فصل اول (آموزش کاربردی PLC)
فصل اول : مقدمه ( آشنایی با PLC )
پیشرفت های چشم گیر فن آوری نیمه هادی در زمینه ساخت ریز پردازنده های باحجم بالا، امکان ساخت کنترل کننده های منطقی الکترونیکی برنامه پذیر را فراهم ساخت.
در این کنترل کننده ها بر خلاف کنترل کننده های مبتنی بر بخش های الکترو مکانیکی ، برای تغییر منطق کنترل کافی است بدون تغییر در سیم کشی یا قطعات ، فقط برنامه را تغییر دهیم . در این صورت می توانیم از یک کنترل کننده منطقی برنامه پذیر هر جا که خواسته باشیم استفاده کنیم.
شکل زیر یک کنترل کننده منطقی برنامه پذیر ( LOGO- ساخت شرکت Siemens آلمان ) را نشان می دهد.
PLC برگرفته شده از کلمات Programmable Logic Controller به معنی کنترل کننده منطقی برنامه پذیر می باشد.
مدل های مختلف PLC توسط کمپانی های مختلف نظیر …Siemens,Allen Bradlly,Omron,LG ساخته شده و در بازار صنعت و آموزش به طور وسیع مورد استفاده قرار گرفته است.
مزایای استفاده از PLC :
- با استفاده از PLC حجم تابلو های نرمال کاهش می یابد.
- استفاده از PLC مخصوصاً در فرایند های پیچیده موجب صرفه جویی زیاد در هزینه می گردد.
- طول عمر اینگونه مدارات به مراتب بیشتر است و نیازی به سرویس و تعمیرات دوره ای ندارد.
- مصرف انرژی PLC بسیار کمتر از مدارهای رله ای است.
- PLC نویزهای صوتی و الکتریکی را ایجاد نمی کند .
- ایجاد تغییرات و تنظیمات در PLC بسیار آسان و سریع می باشد .
- عیب یابی اینگونه مدارات بسیار آسان و سریع انجام می گیرد .
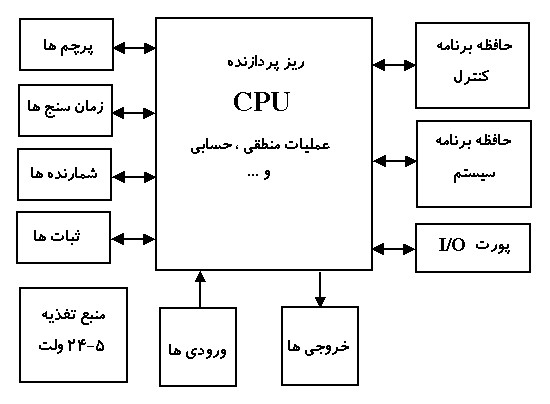
ساختمان داخلی PLC شبیه به ساختمان داخلی هر سیستم ریز پردازنده دیگر است . شکل زیر ساختمان داخلی PLC را بطور کلی نشان داده است .
هر PLC دارای زبان برنامه نویسی خاص خود بوده که رابط بین کاربر و سخت افزار PLC می باشد . به وسیله یک برنامه است که یک PLC ، پروسه مورد نظر را کنترل می کند . از این رو روشهای برنامه نویسی مختلفی وجود دارد که در ادامه توضیح داده می شوند .
برنامه نویسی به روش نردبانی (Ladder) :
از آنجا که تمام نقشه های کنترل و نرمال منطقی قبل از ظهور PLC ها به صورت نردبانی و یا چیزی شبیه به آن تهیه و طراحی می شود ، لذا سازندگان PLC ، این روش برنامه نویسی را بعنوان یکی از روشهای ممکن برنامه نویسی انتخاب نموده اند . شکل زیر یک نمونه برنامه نویسی به زبان LAD را نمایش می دهد . در این روش آن دسته از عناصر که تابع یا عمل خاص و پیچیده ای را انجام می دهند برای سهولت با یک مربع نمایش داده می شوند . دستورات نوشته شده به روش نردبانی به ترتیب از چپ به راست و از بالا به پایین انجام می گیرند .
برنامه نویسی به روش FBD و یا روش فلو چارتی :
در این روش برنامه بصورت بلوکی نوشه شده که در آن هر بلوک یک عملگر می باشد . بدین ترتیب برنامه های نوشته شده به روش FBD عبارتند از یک سری جعبه که به یکدیگر متصل گردیده اند . روشهای فوق الذکر معمولا ٌ بطور مستقل کاربرد چندانی ندارد و اغلب برای عیب یابی و یا شناخت منطق کنترل سیستم نا شناخته بسیار مفید است . شکل زیر یک نمونه برنامه نوشته شده به روش FBD و یا CSF را نمایش می دهد .
برنامه نویسی به روش لیست جملات و یا STL :
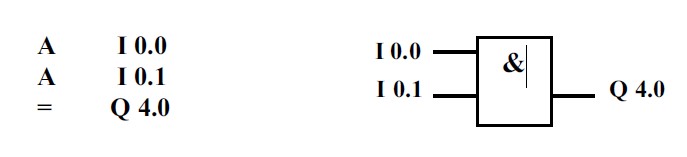
در این روش هر عمل منطقی توسط یک جمله یا عبارت مناسب نوشته می شود . مثال ارائه شده در شکل صفحه بعد نمونه ای از برنامه نوشته شده به روش STL را نمایش می دهد . در این مثال حرف A بیانگر دستور AND می باشد . نکته قابل توجه در این روش برنامه نویسی آن است که هر PLC دارای کد دستورات منحصر به فردی می باشد که این دستورات به نوع CPU بکار رفته بستگی دارد . روش STL نیاز های گرافیکی بسیار کمتری نسبت به دو روش قبل دارد ، لذا نوع و تعداد دستورات قابل درک را جدا در این روش بسیار دشوار تراز روشها ی LAD و FBD می باشد . به همین دلیل برنامه هایی که به روش LAD یا FBD نوشته می شود ، معمولاً قابل تبدیل به STL می باشد در حالیکه عکس این قضیه امکان پذیر نیست .
کنترل کننده های منطقی برنامه پذیر امروزی :
از اولین سالهای تولد PLC تا کنون بیش از سه دهه می گذرد . در این مدت شاهد تغییرات بسیار در ساختار PLC ها بوده ایم . از جمله این تغییرات می توان به افزایش سرعت عملکرد توانایی کار با سیگنالهای آنالوگ و دیجیتال و همچنین برخوردار شدن از امکانات ارتباطی سریع و . . . اشاره نمود . برای برنامه نویسی PLC های قدیمی نیاز به یک Programmer مخصوص بود که این امر قیمت تمام شده یک سیستم کنترل منطقی با PLC را افزایش می دهد . در حال حاضر امکان برنامه ریزی PLC ها با استفاده از کامپیوتر های شخصی فراهم گردیده است و این امر سهولت و صرفه جویی قابل ملاحضه ای را ایجاد نموده است .
در ابتدا راه اندازی ، مانند هر سیستم مبتنی بر پردازنده ، د ر PLC نیز برنامه سیستمی اجرا می گردد . پس از اجرا برنامه سیستمی و چک شدن سخت افزار ، در صورتی که شرایط لازم برای ورود به حالت اجرا (RUN) فراهم باشد ، برنامه کاربر فرا خوانده می شود . برای اجرای برنامه کاربر ابتدا تمام ورودی های PLC بطور کامل فراخوانده می شود و وضعیت آنها ( صفر یا یک ) در مکانی به نام تصویر ورودی (Input – Image – Area) نوشته می شود . PLC در خلال اولین Scan برنامه کاربر نتایج حاصل را در مکانی بنام تصویر خروجی (Output – Image – Area ) می نویسد و بعد از اجرای کامل برنامه و در پایان ، نتایج را بطور یکجا به خروجی ها ارسال می دارد . خواندن یکجا ورودی ها و ارسال یکجا خروجی ها ، صرفه جویی قابل توجه ای در زمان به دنبال دارد ، زیرا خواندن یا نوشتن با آدرس دهی یک به یک ، زمان زیادی را به خود اختصاص می دهد .
از جمله مزایای دسترسی به مکانهای تصویر خروجی را مستقل از وضعیت فیزیکی آنها فراهم می نماید و این کار مزیت بزرگی به هنگام عیب یابی یا آزمایش یک برنامه نوشته شده محسوب می شود . روش فوق در عین مزایایی که ذکر گردید مسئله ای به نام زمان پاسخ دهی برنامه را بوجود می آورد زمان پاسخ دهی مدت زمانی است که طول می کشد تا PLC تمام برنامه کاربر را Scan نماید و در این مدت تغییرات بوجود آمده در ورودی ها وارد مکان تصویر ورودی نمی گردد و خروجی ها نیز به حالتی که در Scan قبلی بودند باقی می ماند ، این امر در فرایندهایی با سرعت تغییرات زیاد مشکل ساز است ، مخصوصاً زمانی که برنامه کاربر طولانی بوده و مدت زمان زیادی صرف Scan برنامه می گردد . همچنین گاهی ملاحظات ایمنی لازم میدارد که تغییرات آنی بعضی از ورودی ها همواره مورد توجه قرارگیر که در این صورت زمان پاسخ دهی ممکن است مانع از ثبت به موقع این تغییرات شود . برای حل این مشکل در زبانهای برنامه نویسی و دستورات خاص گنجانده شده است .
با توجه به سرعت بالا ی PLC های امروزی و کندی فرایندهایی که توسط آن کنترل می گردند (سیستم های الکترو مکانیکی ) زمان پاسخ دهی در شرایط عادی ، معمولاً مشکلی ایجاد نمی نماید .
نوشته شده توسط شاهکار الکترونیک
مطالب مرتبط :
تکترونیکس
گودویل
ریگول